This page looks at the latest Robots being developed around the world. If you would like to discover even more about robotics, then please click here. If you come across other robots you would like us to talk about, then please add a comment at the end of the page.
ASIMO
Designed by Honda
ASIMO can also avoid moving obstacles as it moves through its environment.ASIMO, which stands for Advanced Step in Innovative Mobility, is the culmination of two decades of humanoid robotics research by Honda engineers. ASIMO can run, walk on uneven slopes and surfaces, turn smoothly, climb stairs, and reach for and grasp objects. ASIMO can also comprehend and respond to simple voice commands. ASIMO has the ability to recognise the face of a select group of individuals. Using its camera eyes, ASIMO can map its environment and register stationary objects. Read More
Pepper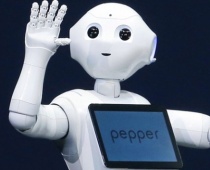
Designed by Aldebaran Robotics
Pepper is a humanoid robot by Aldebaran Robotics and SoftBank Mobile designed with the ability to read emotions. It was introduced in a conference on 5 June 2014. Pepper is not a functional robot for domestic use. Instead, Pepper is intended “to make people happy”, enhance people’s lives, facilitate relationships, have fun with people and connect people with the outside world. Pepper’s creators hope that independent developers will create new content and uses for Pepper. Read More
PR2
Designed by Willow Garage
The PR2, Personal Robot 2, is a service robot designed to work with people. As a personal robot, the PR2’s main function is to undertake applications that enable people to be more productive at home, at work and at play. The PR2 combines the mobility to navigate human environments, and the dexterity to grasp and manipulate objects in those environments. Read More
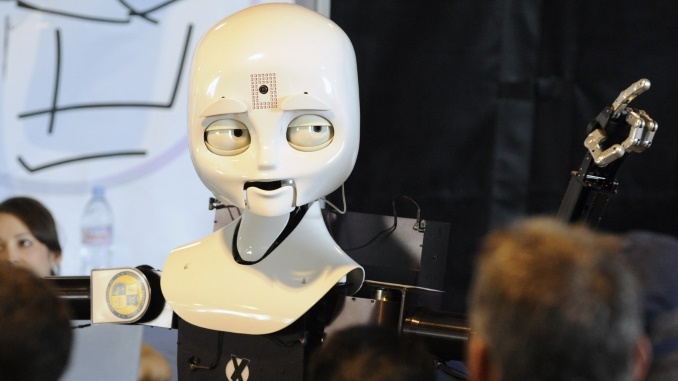
Nexi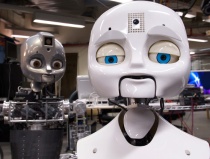
Designed by MIT
Nexi is designed to convey human emotions though facial movements, such as slanting eyebrows and head-movements. The Nexi robot has been designed by Xitome Design in collaboration with MIT and has been refereed to by MIT as a “MDS” class of robot this being short for ‘Mobile/Dexterous/Social’. Read More
Robonaut-2
Designed by NASA and General Motors
NASA and General Motors have joined forces to develop a new version of NASA’s humanoid robot astronaut. Robonaut-2 or R2, was first demonstrated to the public on 4th February 2010. The aim of the Robonaut project is to investigate technologies that can be used in space exploration to help and improve safety for astronauts. Read More
Spirit and Opportunity Rovers
Designed by Jet Propulsion Laboratory (JPL)
NASA’s Mars Exploration Rover Mission (MER), is an ongoing robotic space mission involving two rovers, Spirit and Opportunity, exploring the planet Mars. It began in 2003 with the sending of the two rovers — MER-A Spirit and MER-B Opportunity — to explore the Martian surface and geology. Read More
da Vinci Surgical System
Designed by Intuitive Surgical
The da Vinci Surgical System, developed by Intuitive Surgical, is a sophisticated robotic platform designed to enable complex surgery using a minimally invasive approach. The da Vinci System consists of an ergonomic surgeon’s console, a patient-side cart with four interactive robotic arms, a high-performance 3D HD vision system and proprietary EndoWrist® instruments. Read More
RT-1
Designed by Elumotion
RT-1 is a self contained, fully automated Robotic Torso, designed and built by Elumotion to provide a robotic platform based on human anatomy. RT-1 is a highly articulated manipulating platform and includes novel dexterous hands that allow emulation of human gesturing. Read More
Partner
Designed by Toyota
Partner is a series of Robots being developed by Toyota. As the table below shows the Partner Robots come in three forms: Walking, Rolling and Mountable. Toyota are pitching their Partner Robot as a ‘Personal Assistance’ Robot, and by having three diverse types of Robot, they are able to compete with their main rival, namely Honda’s Asimo, in areas that ASIMO is not capable of functioning. Read More
GroundBot
Designed by Rotundus
GroundBot is a self-contained autonomous Robot developed by Rotundus. GroundBot has been designed as a sealed unit with no external moving parts. Instead an internal gyroscopic weight is used to propel the Robot forward, as shown in the adjacent diagram. Read More
PackBot
Designed by iRobot
PackBot has been designed to easily climbs stairs, rolls over rubble and navigates narrow, twisting passages. The robot’s patented mobility platform features dual QuickFlip™ track articulations. These ‘flippers’ are capable of continuous 360-degree rotation and enable PackBot to traverse rocks, mud, snow, gravel and other tough terrain. Read More
iCub (RobotCub Project)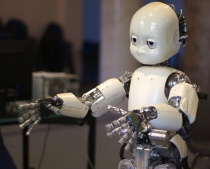
Designed by RobotCub Consortium
The iCub, ‘Cub’ standing for Cognitive Universal Body, is a 53 degree-of-freedom humanoid robot of the same size as a three and a half year-old child. It can crawl on all fours and sit up. Its hands allow dexterous manipulation and its head and eyes are fully articulated. It has visual, vestibular, auditory, and haptic sensory capabilities. Read More
Walk-Man
Designed by Italian Institute of Technology
Walk-Man is a robot android created by Italian Institute of Technology in Genoa , directed by Roberto Cingolani . High 185 cm and weighing 118 kg (with battery); shoulder width 80 cm and 56 cm wide pelvis, arm span 2 meters. The Italian Institute of Technology has developed a European project called WALK-MAN also launching a humanoid robot named Walk-Man and funded by the European Commission by the end of 2013. Read More
Nao
Designed by Aldebaran Robotics
Nao (pronounced “now”) is a medium-sized humanoid autonomous robot, developed by Aldebaran Robotics. Nao has four microphones fitted into his head and a voice recognition and analysis system. He recognises a set of predefined words that you can supplement with your own expressions. These words trigger any behaviour you choose. Available so far in English and French, we are working on adding six other languages (Dutch, German, Italian, Spanish, Mandarin and Korean). Read More
PaPeRo
Designed by NEC Corporation
PaPeRo is a personal Robot being developed by NEC Corporation. The small size and colourful design of PaPeRo is intended to appeal to both children and adults, with its face designed to look both friendly and non-threatening. Development began in 1997 with the first prototype R100, and in 2001 the name PaPeRo, which stands for “Partner-type-Personal-Robot” was adopted. Read More
RoBoHoN
Designed by Sharp
Designed and Manufactured by Sharp, their vision for RoBoHoN has to design a phone which we interact differently compared to traditional phones. Instead of having a phone in your pocket all day, RoBoHon has been designed as companion. RoBoHon weighs 390 grams and has a 2-inch display and a built-in projector. Read More
Sojourner
Designed by Jet Propulsion Laboratory (JPL)
Sojourner is the name given to the first robotic roving vehicle to be sent to the planet Mars. Sojourner weighs 11.0 kg (24.3 lbs.) on earth (about 9 lbs. on Mars) and is about the size of a child’s small wagon. The Microrover has six wheels and can move at speeds up to 0.6 meters (1.9 feet) per minute. Read More
BigDog
Designed by Boston Dynamics
BigDog is a legged robot under development of Boston Dynamics, with funding from DARPA. Their goal is to build unmanned legged vehicles with rough-terrain mobility superior to existing wheeled and tracked vehicles. The idea system would travel anywhere a person or animal could go using their legs, run for many hours at a time, and carry its own fuel and payload. Read More