Sojourner is the name given to the first robotic roving vehicle to be sent to the planet Mars. Sojourner weighs 11.0 kg (24.3 lbs.) on earth (about 9 lbs. on Mars) and is about the size of a child’s small wagon. The Microrover has six wheels and can move at speeds up to 0.6 meters (1.9 feet) per minute. This isn’t very fast, but during the course of a day on Mars the Microrover can cover a lot of territory (perhaps up to 3 meters). However, that speed will be fast enough to accomplish many tasks during a day, since we are not planning on driving the Microrover more than 10 meters (32.8 feet) away from the lander.
The rover’s wheels and suspension use a rocker-bogie system that is unique in that it does not use springs. Rather, its joints rotate and conform to the contour of the ground, providing the greatest degree of stability for traversing rocky, uneven surfaces. A six-wheel chassis was chosen over a four-wheel design because it provides greater stability and obstacle-crossing capability. Six-wheeled vehicles can overcome obstacles three times larger than those crossable by four-wheeled vehicles. For example, one side of Sojourner could tip as much as 45 degrees as it climbed over a rock without tipping over. The wheels are 13 centimeters (5 inches) in diameter and made of aluminum. Stainless steel treads and cleats on the wheels provide traction and each wheel can move up and down independently of all the others. Three motion sensors along Sojourner’s frame can detect excessive tilt and stop the rover before it gets dangerously close to tipping over. Sojourner is capable of scaling a boulder on Mars that is more than 20 centimeters (8 inches) high and keep on going.
NASA has an impressive history of building roving vehicles. The first US roving vehicle used for space exploration went to the moon on Apollo 15 (July 30, 1971) and was driven by astronauts David R. Scott and James B. Irwin. Two other Lunar Roving Vehicles (LRV) also went to the moon on Apollo 16 and 17. These rovers were battery powered and had radios and antenna’s just like Sojourner. But unlike Sojourner, these rovers where designed to seat two astronauts and be driven like a dune buggy. Sojourner will be more autonomous and receive remote command sequences from engineers on Earth instructing it where to go . Here is an image (to scale) showing Sojourner and an Apollo LRV side by side. Notice any similarities or differences?
Microrover Mission Objectives and Highlights
The primary function of Sojourner is to demonstrate that small rovers can actually operate on Mars. The Russians placed a remote control vehicle on the moon called Lunakhod 1 (Luna 16). It landed on November 11, 1970 and drove a total of 10.5 Km and covered a visual area of 80,000 square meters during which it took more than 20,000 images. Even though there was only a 3 second signal delay, that rover proved very difficult to drive. Sojourner will be humanities first attempt to operate a remote control vehicle on another planet. After landing, Sojourner will stand up and drive down one of the two ramps mounted to the lander petal. A lander IMP (IMager for Pathfinder) camera mission panoramic image as well as images taken on either side of the rover petal will assist the mission operations engineers in deciding which ramp is safest to drive down. After a successful ramp egress we will begin a nominal 7 sol (1 sol = 1 Martian day) mission to conduct science and technology experiments. This mission is conducted under the constraint of a once-per-sol opportunity for command and telemetry transmissions between the lander and earth operators. Communications with the rover is not done in real-time because of the approximately 11 minute light-time delay in receiving the signals. Sojourner must be able to carry out her mission with a form of supervised autonomous control. This means that goal locations (called waypoints) or move commands must be sent to the rover ahead of time and Sojourner then navigates and safely traverses to these locations on her own.
Mars Pathfinder Spacecraft
Mars Pathfinder was designed to be a demonstration of the technology necessary to deliver a lander and a free-ranging robotic rover to the surface of Mars in a cost-effective and efficient manner. Pathfinder not only accomplished this goal but also returned an unprecedented amount of data and outlived its primary design life.
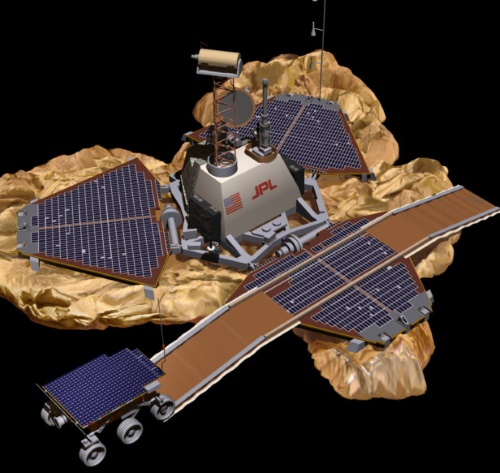
Mars Pathfinder used an innovative method of directly entering the Martian atmosphere, assisted by a parachute to slow its descent through the thin Martian atmosphere and a giant system of airbags to cushion the impact. The landing site, an ancient flood plain in Mars’ northern hemisphere known as Ares Vallis, is among the rockiest parts of Mars. It was chosen because scientists believed it to be a relatively safe surface to land on and one which contained a wide variety of rocks deposited during a catastrophic flood.
The lander, formally named the Carl Sagan Memorial Station following its successful touchdown, and the rover, named Sojourner after American civil rights crusader Sojourner Truth, both outlived their design lives — the lander by nearly three times, and the rover by 12 times.
From landing until the final data transmission on September 27, 1997, Mars Pathfinder returned 2.3 billion bits of information, including more than 16,500 images from the lander and 550 images from the rover, as well as more than 15 chemical analyses of rocks and soil and extensive data on winds and other weather factors. Findings from the investigations carried out by scientific instruments on both the lander and the rover suggest that Mars was at one time in its past warm and wet, with water existing in its liquid state and a thicker atmosphere.
Further information: